NIAMH COLES - Robotic Finger
SPECIFICATIONS
1. Mechanical
1.1. Three segments approximately equal in length and size to human bones
1.2. Segments are connected to allow same range of motion as a human finger
1.3. Mechanical "tendons" to hold and adjust position of robot
1.4. Robot can hold weight of 5lb in bent/closed position
1.5. Robot can withstand the motion of opening and closing 1000+ times
2. Electrical
2.1. "Tendons" can be tightened and loosened via servos to adjust the position of the joints
2.2. Battery length of 2+ hours of use
2.3. Battery is easy to access and/or rechargeable
2.4. Arduino programmed to control position of finger based on angle of joint
Research
Given that this project was similar to both a human finger and a prosthetic extremity, my initial research composed of the following:
- Current Prosthetic and Bionic Joint Technology
- Human Joint Mechanics
While researching current prosthetics, I wrote the following paper as an overview of the industry for school assignment.
To add to my skillset and allow me to print and program prototypes, I researched and practiced using the following:
- Solidworks CAD Design
- Servos, Arduino, and Power Supplies
Human Finger Mechanics
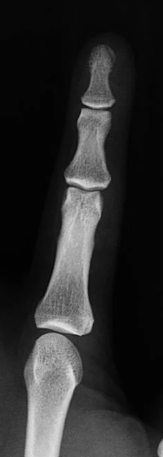
Because the goal of this project is to mimic the mobility of a human finger, it was important to me to do research on the mechanics involved.
The first prototype drew inspiration directly from human finger bones, and closely mimicked the shape. Later prototypes deviated from the human joint, but retained the tendon mechanism found in human fingers.

Prototype 1.1